




Lorsqu’il est en plongée, le sous-marin a besoin de connaître sa position.
Il dispose pour cela de plusieurs moyens, souvent complémentaires.

Sous-marinier au périscope à bord du SNA Saphir © Marine Nationale / V.Maupile
- Le périscope est le moyen classique de positionnement des sous-marins.
Il a l’avantage de permettre de se situer par rapport à des points fixes : côtes, étoiles la nuit. Seul inconvénient : cela implique que le sous-marin soit proche de la surface, donc facilement repérable.
- Le sonar actif permet au sous-marin de se repérer par rapport au fond de l’océan.
Il consiste à émettre des ondes sonores qui sont réfléchies par le fond.
La mesure du temps nécessaire à ces ondes pour revenir au sous-marin et la connaissance de la célérité du son dans l’eau de mer permet de calculer la distance du sous-marin par rapport au fond.
Cette technique présente l’inconvénient, pour un sous-marin militaire, d’émettre des ondes sonores et donc de nuire à sa discrétion.

Sous-marinier devant la table traçante à bord du SNA Saphir © Marine Nationale / V.Maupile
- Les centrales inertielles (ou centrales à inertie) sont des appareils basés sur l’utilisation de gyroscopes, de capteurs d’accélération et de vitesse angulaire.
Elles permettent de calculer en temps réel à partir de ces mesures, l’évolution du vecteur vitesse et de la position du sous-marin, ainsi que de son attitude : roulis, tangage, cap.
- Le GPS est utilisé par le sous-marin lorsqu’il est proche de la surface (immersion périscopique).
Le système GPS fonctionne grâce à une constellation de 24 satellites tournant à plus de 19000 km au-dessus de la Terre.
Ils transmettent en continu leur position dans l’espace ainsi que l’heure précise. Ils révolutionnent autour de la Terre en 12 heures.
En se positionnant par rapport à 3 satellites, le sous-marin peut connaître de façon très précise sa longitude et sa latitude.
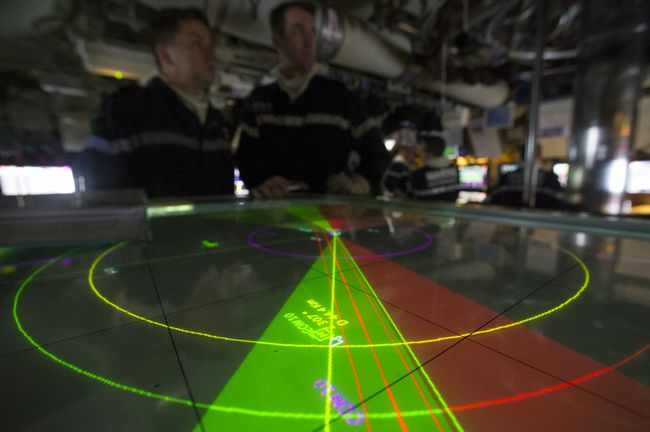
Table traçante au Poste Central Opérations d’un sous-marin nucléaire lanceur d’engins © Marine Nationale / J.Peschel