Complété par les pièces d’artillerie remontées en 1993, le site révèle également de nombreuses pièces d’armement telles que des mousquets et des épées offrant un objet d’étude sur l’armement du 17e siècle. Toutefois, les concrétionnements visibles sur les canons en fonte de fer et le manque de temps ne permettent pas d’ébaucher l’étude des canons visibles sur le site.
L’observation de l’épave et des vestiges doit également étayer des hypothèses quant aux causes du naufrage. Les archéologues ont une théorie mais aucune preuve sur les raisons du naufrage. S’agit-il d’une tempête ou d’un complot dans le contexte politique tourmenté du début de règne de Louis XIV ?
En décembre 2012, le documentaire réalisé par ARTE intitulé « Opération Lune, l’épave cachée du Roi-Soleil » est diffusé en première partie de soirée.
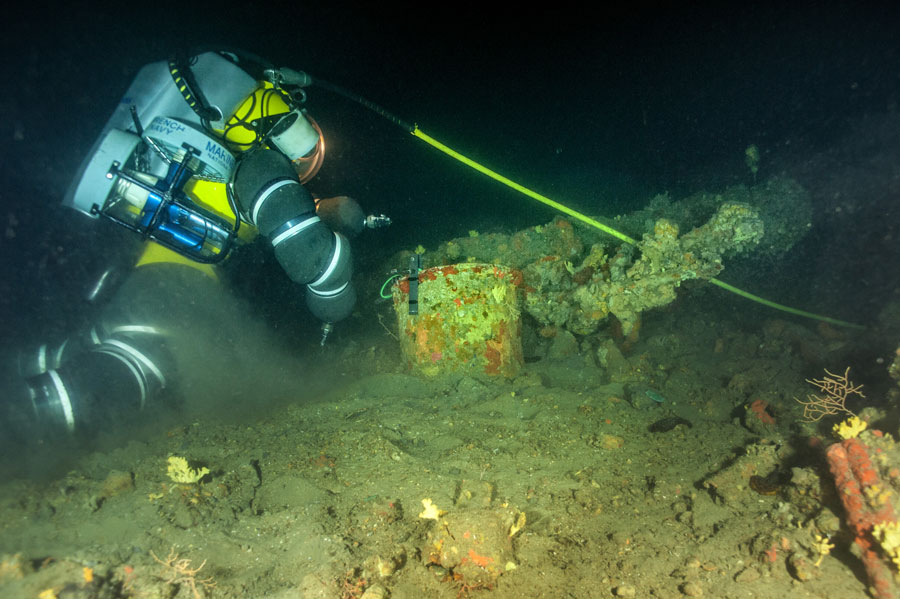
En 2013, le projet mené entre le DRASSM et Maylis GARCIA (ENSTA) aboutit à la mise en place d’un programme de recherche et de développement baptisé CORSAIRE (Consortium en Robotique Sous-marine pour l’Archéologie Innovante et la Récupération d’Épaves). Ce programme se propose de développer un système robotique de toute nouvelle génération capable d’effectuer jusqu’à 2 500 mètres de profondeur toutes les manipulations actuellement effectuées par faible fond par un archéologue sous-marin. Ce robot doit être capable de collecter des objets et d’effectuer de la cartographie 3D.
Ce chantier préfigure l’archéologie sous-marine de demain avec la conception « d’une famille de robots capables de travailler comme un humain, peu importe la profondeur et la pression. On doit obtenir la même maniabilité, la même finesse que si on le faisait soi-même. »
En octobre 2013, une seconde campagne est interrompue en raison de mauvais résultats. Michel L’HOUR fête, en 2013, ses 10 000 heures passées sous l’eau… ce qui représenterait 416 jours de plongée non-stop. En octobre-novembre 2014, débute une 3e campagne d’expertise sur le site de l’épave de La Lune. L’objectif est d’expérimenter le robot baptisé Speedy 1 réalisé par le Laboratoire d’informatique, de robotique et de microélectronique de Montpellier (Lirmm) dans le cadre du projet CORSAIRE.